Memory
Single-programming operating systems: can only run one program at a time (and generally have to memory protection). Multi-programming operating systems: can run multiple programs concurrently
Multiprogramming without memory abstraction is possible if entire program is saved on nonvolatile storage.
Volatile: memory lost when computer is powered off Non-volatile: permanent storage to preserve data
Contiguous memory #
Segmentation allocates a contiguous memory space for each process -> leads to fragmentation
Algorithms:
- Best fit: finds smallest free segment where segment size >= process size
- Worst fit: largest segment >= process size. The remaining part can be used by another process hence the probability of wasting memory is less.
- First fit: first segment which is large enough to fit the process. This saves OS from keeping ordered list of free segments
- Next fit first fit, but keeps track of last place were it found hole and continues there
Compaction: the memory segments are shifted to merge free slots
Fixed memory blocks #
Memory is divided into blocks/pages which solves fragmentation. However we need to translate addresses now.
The memory segments of a process are divided into blocks Each block has access permissions: read, write & execute
A list of blocks for each blocks is stored in the Block Info Table.
Paging #
The memory is divided into equally sized page frames which can be filled with memory blocks called pages. Each page as a page number and page size which can be chosen by the operating system.
Logical address: location of an instruction/variable located by its page number and offset e.g. page 4 and 100 bytes offset [ 4, 100 ] (generated by the CPU)
Physical address: addresses that refer to the actual memory
Page table: table of the page number with assigned page frames and access permission for each process. A reference to it is stored inside the PCB.
Choosing a good page size is important, too big page size creates internal fragmentation were most space in pages is wasted by not being used.
Address translation: translating from logical to physical addresses
Inverted page table: one entry per page frame in real memory rather than one per virtual address space. Save lots of space since virtual memory >> real memory (especially on 64bit systems). Entires = size of RAM / page size. Looup with index does not work, TLB and hash tables are used to make the inverse lookup fast.
Virtual memory #
Virtual memory separates logical and physical memory
(Virtual) address space: a set of addresses that a process can use, each proces has its own addresses space
Page fault: when a page is referred to which is not in the memory, then it must be loaded from the disk If no page frame is free, a page must be replaced. The MMU traps the operating system to replace a page.
MMU (Memory Management Unit): Hardware that translates virtual memory addresses into physical memory addresses.
TLB (Translation Look-aside Buffers): special hardware that quickly looks up frame numbers of pages (often part of the MMU)
EAT (Effective Access Time): hit ratio * (TLB access + memory) + 1-hit-ration * (TLB access 2 * memory access). On a cache miss, 2 memory references are needed because the in-memory page table has to be read
Page replacement algorithms #
Occurs when out of frames, page must be loaded from disk.
Place replacement algorithms criteria:
- Minimize the page faults
- Minimize I/O operations
Page table has 3 bits:
- P(resent) bit (or V(valid) bit) - page is in RAM (otherwise page fault)
- M(odified) bit - page in RAM has been modified
- R(eference) bit - page referenced since last time
Reference string: list of page numbers to evaluate performance
- Optimal (OPT): replace page that will not be used for the longest, not possible in practise but used for measuring performance
- Not Recently Used (NRU): R(ead) and M(odified) status bits are contained in each page table entry and periodically the R bit cleared, algorithms removes a page at random from the lowest class (classes go from not referenced, not modified to referenced, modified)
- First-In First-Out (FIFO): pages are stored in a queue and the oldest is replaced (inefficient because old pages might still be very important)
- Second Chance: modification of FIFO that inspects oldest page. If R is set of the last page it is moved to the front instead (given a second chance). It goes on until it finds a page, if all pages have the R bit set then the last page is removed anyways.
- Clock: more efficient than second chance, has a hand pointer that points to oldest page in a circular list to avoid moving pages around. If the R bit is set to the pointed page is is cleared and the hand moves to the next page until a page is found with R = 0.
- Least Recently Used (LRU): good approximation of optimal algorithm, replace page that is unused for the longest. Problem: list must be updated on every reference, special hardware required to make it fast
- Not Frequently Used (NFU): approximation of LRU, each page as a counter associated with it and on every clock interrupt the R bit is added to. it. Now the counters roughly represent how often each page is referenced. The page with the lowest counter is chosen for replacement. Problem: never forgets anything.
- Aging: modification to NFU, counters are shifted right 1 bit before R is added and R is added to the leftmost bit
Demand paging: pages are loaded on demand i.e. pages are only loaded when a address inside them is referenced
Working set: the set of pages that a process is currently using
Locality of reference: process reference only a small fraction of its pages during a execution phase
Trashing: when a program causes page faults every few instructions
Segmentation #
Provides multiple address spaces called segments In a 1D address space tables might "bump" into each other.
Segments do not have a fixed size leading to checkerboarding / external fragmentation where memory space is wasted in the holes between the segments. This problem can be solved using compaction.
Compaction (defragmentation): memory segments are shifted to merge free slots
Memory hierarchy #
The memory contains different levels that trade off speed vs. capacity: 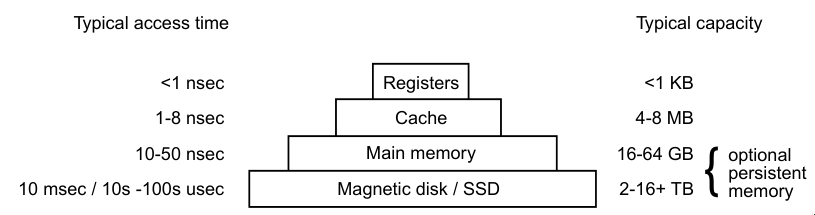
- L1 cache: fastest but smallest cache, always inside every CPU core
- L2 cache: may be shared between all cores or each core might have its own cache
- Random Access Memory (RAM): main memory, is lost after power off
- Read Only Memory (ROM): cannot be changed, preset in factory
- Persistent Memory
- Solid State Drive (SSD): store data in (Flash) memory, much faster than hard drives but still more expensive than HDDs
- Hard disk drive (HDD): consists of spinning disks